MACHINES ASYNCHRONES
Cours et Problèmes
 |
| إضافة شرح |
Explain the electric motors. Parts of electromagnetic motors.
Chapitre 1
Machines asynchrones
Les machines asynchrones sont très utilisées (on estime que 80% des mo-teurs de la planète sont des moteurs asynchrones) car leur coût est inférieur
à celui des autres machines, de plus ces machines sont robustes . Comme les
autres machines, la machine asynchrone est réversible et de très nombreuses
génératrices asynchrones de puissance inférieure à quelques 5 MW fournissent
un surplus d’énergie active aussi bien sur des réseaux terrestres qu’à bord des
navires.
La gamme de puissance couverte par les machines asynchrones est très
étendue : de quelques 5 W pour des moteurs asynchrones monophasés à bagues
de déphasage aux 36,8 MW des moteurs à cage d’écureuil des futurs porteavions britannique de la classe « HMS Queen Elisabeth », en passant par les
24 MW des moteurs asynchrones à cage d’écureuil assurant la propulsion de la
série de paquebots « Norwegian Epic ».
1.1 Symboles
Voici les différents symboles employés pour représenter la machine asynchrone :
CHAPITRE 1. MACHINES ASYNCHRONES
 |
| Expliquez les moteurs électriques. Parties de moteurs électromagnétiques. |
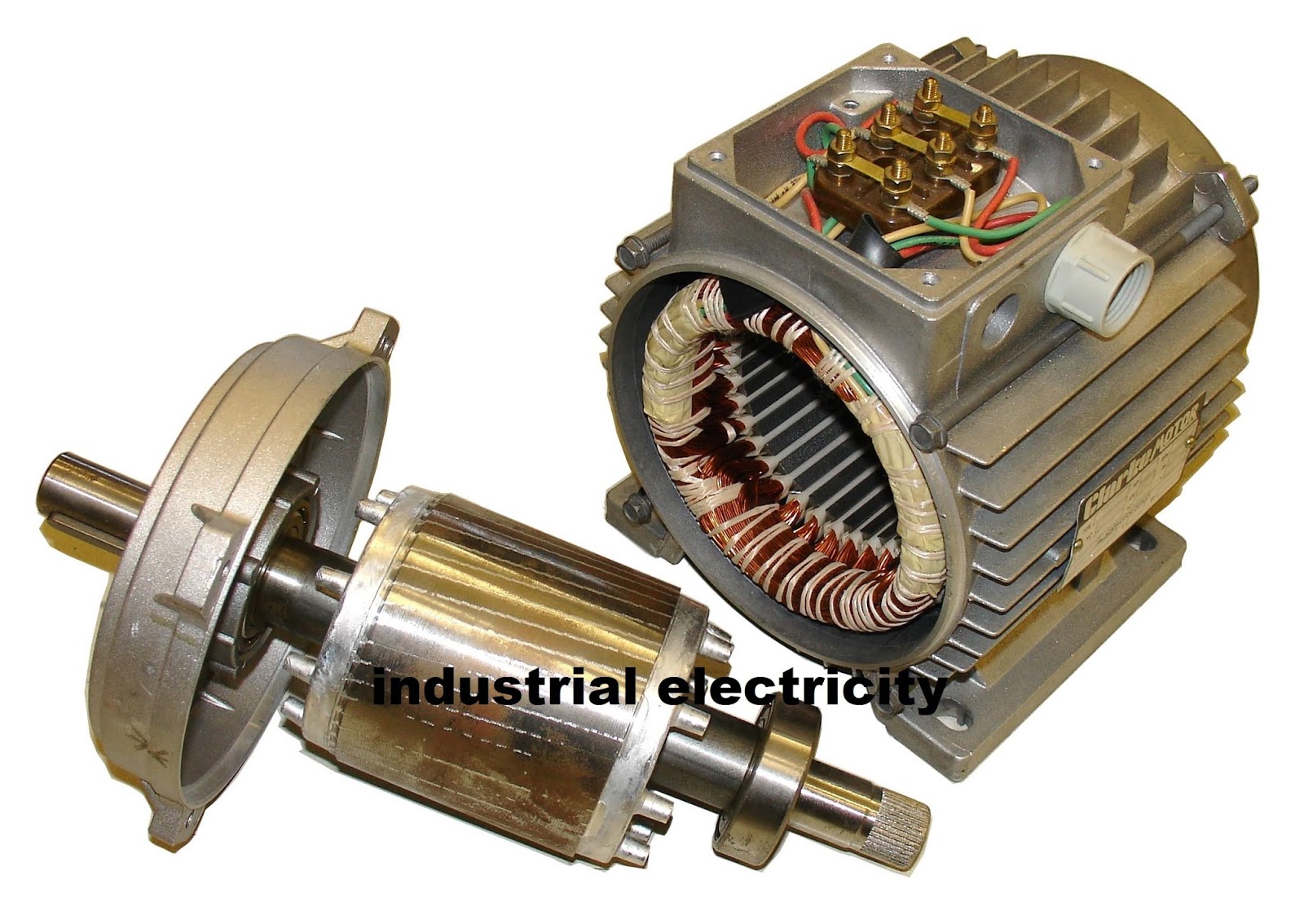
1.2 Structure - Principes de fonctionnement
1.2.1 Structure
Une machine asynchrone comprend généralement :
— un stator triphasé comportant p paires de pôles par phase, identique à
celui d’une machine synchrone ;
— un rotor constitué de conducteurs mis en circuit fermé. On rencontre
deux types de rotor :
➛ rotor bobiné : l’enroulement, semblable à celui du stator, comporte
p paires de pôles par phase ; les trois paires sont reliées à trois bagues
qui permettent d’insérer un rhéostat dans le circuit rotorique. Ce
moteur est aussi nommé moteur à bagues.
➛ rotor à cage : le rotor est constitué de barreaux de cuivre ou d’alumi-nium reliés aux deux extrémités par deux couronnes conductrices.
Ce modèle (en forme de cage d’écureuil) peu coûteux et très robuste
est le plus répandu.
Afin d’éviter l’affaiblissement du champ magnétique statorique du à une
trop grande réluctance, le rotor est empli de disques de tôles d’acier de faible
épaisseur (2 à 3 dixième de millimètre) et isolés électriquement par traitement
chimique de la surface (phosphatation). Pour mémoire, le fer est le matériau le
moins réluctant.
Les enroulements du stator sont connectés aux phases d’alimentation par
les branchements effectués sur la plaque à bornes. Les trois ensembles de p
1.2. STRUCTURE - PRINCIPES DE FONCTIONNEMENT

FIGURE 1.2 – machine asynchrone à rotor bobiné.
 |
| Expliquez les moteurs électriques. Parties de moteurs électromagnétiques. |
FIGURE 1.3 – machine asynchrone à rotor bobin
bobines par phase sont connectés aux 6 bornes de la plaque à bornes de la
manière indiquée par la figure 1.8.
C’est au niveau de la plaque à bornes que l’on peut modifier le couplage
de la machine. La figure 1.9 montre comment effectuer un couplage en étoile
grâce aux barrettes de cuivre effectuant la liaison entre les six bornes. La figure
1.10 montre comment effectuer un couplage en triangle.
CHAPITRE 1. MACHINES ASYNCHRONES
 |
| Expliquez les moteurs électriques. Parties de moteurs électromagnétiques. |
FIGURE 1.4 – les trois bagues de l’arbre moteur d’une machine asynchrone à
rotor bobiné.
 |
| Expliquez les moteurs électriques. Parties de moteurs électromagnétiques. |
FIGURE 1.5 – rotor à cage d’écureuil, la cage vide de fer à gauche et emplie de
rondelles de fer à droite.
1.2.2 Principes de fonctionnement
Le stator, alimenté par un réseau de fréquence f, crée une induction tour-nante BS de vitesse NS, telle que NS =f/p
.
Supposons le rotor immobile : il est balayé par cette induction et des forces
1.2. STRUCTURE - PRINCIPES DE FONCTIONNEMENT 5
 |
| Expliquez les moteurs électriques. Parties de moteurs électromagnétiques. |
FIGURE 1.6 – rotor à cage d’écureuil, le rotor est en aluminium injecté et moulé
sous pression sur les rondelles de fer ; celles-ci ont été éliminées avec de l’acide
afin de rendre la cage d’écureuil parfaitement visible.
 |
| Expliquez les moteurs électriques. Parties de moteurs électromagnétiques. |
FIGURE 1.7 – L’aspect extérieur d’un rotor à cage ne permet pas de distinguer la
cage d’écureuil pourtant bien présente à l’intérieur.
électromotrices sont engendrées dans les conducteurs (loi de Faraday e =dϕ/d t ).
Comme les circuits rotoriques sontfermés, des courants rotoriques prennent
naissance. Il apparaît des forces électromotrices dues à l’action de l’induction
statorique sur les courants rotoriques. En vertu de la loi de Lenz, ces forces
tendent à entraîner le rotor dans le sens des inductions tournantes. Il existe
un couple de démarrage, le rotor se met à tourner si le couple est suffisant.
 |
| Interconnexions astrales et trigonométriques dans les moteurs électriques |
FIGURE 1.8 – Plaque à bornes d’une machine asynchrone triphasée.
 |
| Interconnexions astrales et trigonométriques dans les moteurs électriques |
FIGURE 1.9 – Couplage du stator en étoile d’une machine asynchrone triphasée.
Pour qu’il y ait couple, il faut donc :
— que les circuits rotoriques soient fermés, sinon les courants rotoriques
sont nuls ;
— que la vitesse N prise par le rotor soit différente de la vitesse NS de l’in-duction. Si N = NS, les conducteurs tournent à la vitesse de l’induction
statorique, aucune f.é.m. n’est induite, et par conséquent aucun courant
ne circule dans le rotor : il ne peut y avoir de couple.
1.2. STRUCTURE - PRINCIPES DE FONCTIONNEMENT
 |
| Interconnexions astrales et trigonométriques dans les moteurs électriques |
FIGURE 1.10 – Couplage du stator en triangle d’une machine asynchrone tri-phasée.
On obtient donc un résultat très différent de celui de la machine synchrone
pour laquelle il n’y avait de couple qu’au synchronisme. Pour la machine syn-chrone :
— si N < NS couple moteur ;
— si N = NS couple nul ;
— si N > NS couple de freinage.

FIGURE 1.11 – Principe de fonctionnement d’une machine asynchrone.
REMARQUES :
— Le nombre de pôles doit être le même au rotor et au stator. Dans le cas de
la cage d’écureuil, ce résultat est automatique. La répartition des f.é.m.
dans les barreaux de la cage est imposée par les pôles de l’inducteur sta-torique fictif : deux barreaux distants de 180°/p ont des f.é.m. opposées
et constituent une « spire » dans laquelle circule le courant rotorique. Le
nombre de pôles rotoriques est donc égal à p.
— Démarrage en asynchrone d’un moteur synchrone : on place souvent une
cage d’écureuil sur l’inducteur d’un moteur synchrone. Cette cage s’op-pose aux déplacements relatifs du rotor par rapport à l’induction tour-nante du stator et par suite amortit le mouvement de décalage du rotor
lors des phénomènes transitoires dus aux variations brusques de couple
(amortisseur Leblanc).
Comme pour le moteur asynchrone, le démarrage est alors possible en
l’absence d’excitation continue. Si le moteur est à vide, il atteindra presque
la vitesse de synchronisme et on pourra alors le synchroniser en l’exci-tant. Ce mode de démarrage, très simple, ne convient qu’aux moteurs
synchrones de faible puissance en raison du courant et du couple élevés
lors de la synchronisation.

FIGURE 1.12 – Une machine asynchrone comporte le même nombre de pôles
au rotor et pour une phase statorique.
1.2. STRUCTURE - PRINCIPES DE FONCTIONNEMENT 9
1.2.3 Glissement - fréquences rotoriques
1.2.3.1 Glissement
L’origine des courants rotoriques réside dans la différence des vitesses NSet N. On introduit une grandeur fondamentale, sans dimension, le glissement
g définit par :

La vitesse relative de l’induction statorique par rapport au rotor est :
NS − N = g · NS
Par suite, le rotor ayant p paires de pôles, la fréquence des f.é.m. et des cou-rants est donc :
fR = p ·(g · NS) et comme NS =f/p
fR = g · f
La fréquence des grandeurs rotoriques est proportionnelle au glissement.
En général, le glissement sera faible et la fréquence rotorique sera faible elle
aussi (quelques hertz).
APPLICATION : On peut mesurer directement le glissement en mesurant la
fréquence rotorique fR. Comme g est faible, la précision obtenue est meilleure
qu’en mesurant NS, N et en faisant la différence. Dans le cas du moteur à ro-tor bobiné, il est facile d’accéder à une tension détectable (entre deux bagues
par exemple). Pour le moteur à cage, on peut, si nécessaire, détecter les faibles
tensions induites entre les extrémités de l’arbre.
1.2.3.3 Inductions tournantes
Les courants rotoriques, de fréquence fR, engendrent à leur tour une induc_tion rotorique qui tourne à la vitesse
fR/p=g·f/p= g · NS
L’induction rotorique tourne donc, elle aussi, à la vitesse NS par rapport au
stator :
g · NS + N = NS
Quelle que soit la vitesse du rotor, les inductions statoriques et rotoriques
ont toujours la vitesse NS. De leur composition provient le couple électroma-gnétiqueCe qui est produit à la vitesse NS comme dans une machine synchrone
et transmis au rotor. Les lois de la dynamique impliquent qu’en régime pe-manent (N = constante), ce couple soit égal au couple mécanique résistant Cm
opposé au rotor.

FIGURE 1.13 – Les champs rotoriques et statoriques d’une machine asynchrone
tournent à la même vitesse.
1.2.3.4 Bilan de puissance
On peut regrouper sur un diagramme les diverses pertes de puissance active
du moteur :
— Puissance absorbée : Pa = 3V1I1 cosϕ1.
— Pertes Joule du stator : si R1 est la résistance d’une phase statorique, alors

.........download.....

MACHINES ASYNCHRONES
.
{kind=link}
تعليقات
إرسال تعليق